
신속하고 경제적인 모발이식, 의사와 환자 만족도도 증가
국제모발이식학회(ISHRS)에 따르면 모발이식 관련 세계 시장 규모는 2006년부터 2014년까지 76%로 폭발적으로 증가했다. 2014년 기준 2조 8,625억 원이었던 시장 규모는 2012년 대비 28%나 증가한 셈이다. 특히, 모발이식 수술은 2014년도에 미국에서만 112,409번, 전 세계적으로는 397,048번의 수술이 행해진 것으로 집계되었다.
모발이식의 수요는 전 세계적으로 증가하는 추세이지만, 모발이식은 사람의 후두부 두피 영역 중 일부를 절개, 약 2천 개의 모낭을 일일이 사람의 손으로 하나씩 심게 되어 의사 및 환자의 피로도가 높고, 시간도 많이 소요된다.
ETRI 연구진이 이러한 모발이식 수술의 문제점을 개선하는 자동 식모기 기술 개발에 성공하고, 내년부터 본격 상용화에 나선다. 본 기술은 한 번에 25개의 모낭을 연속적으로 심을 수 있는 것으로, 2천 개의 모낭을 심는다고 가정했을 때 2시간 이내에 수술이 가능하다.
기존 모발이식 수술은 모낭을 심을 때, 평균 4시간이 걸렸으며 환자 1명당 의사의 팔 움직임을 거리단위로 따지면, 1km에 달했다. 연구진이 개발한 본 기술은 수술 시간을 절반으로 줄이고, 팔 움직임도 1백여 m에 불과하다. 이로써 수술 시간이 단축되어 비용도 절감될 전망이다.
임상 시험 마치고, 내년 상용화 준비
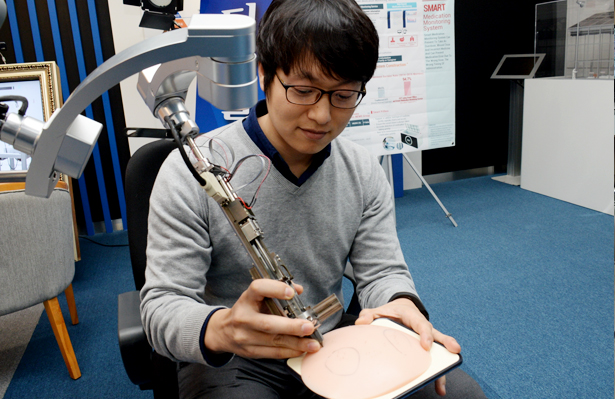
연구진이 개발한 식모기는 정밀가공은 물론, 모터, 모터제어, 임베디드 SW 제어기술 등을 활용하여 식모기 설계부터 제작까지 일련의 과정을 개발해 임상 시험까지 마쳤다.
본 기술은 수술 시 바늘의 전·후진 속도 조절이 가능하고, 총 수술시간 및 이식 모낭 개수를 자동 계산해 디스플레이에 표시해준다. 또한, 환자의 두피 상태 및 모낭의 크기를 고려, 바늘의 깊이, 봉의 이동 할 거리 등을 조정할 수 있는 의료 임상환경과 IT 및 기계 공학의 융합기술이다.
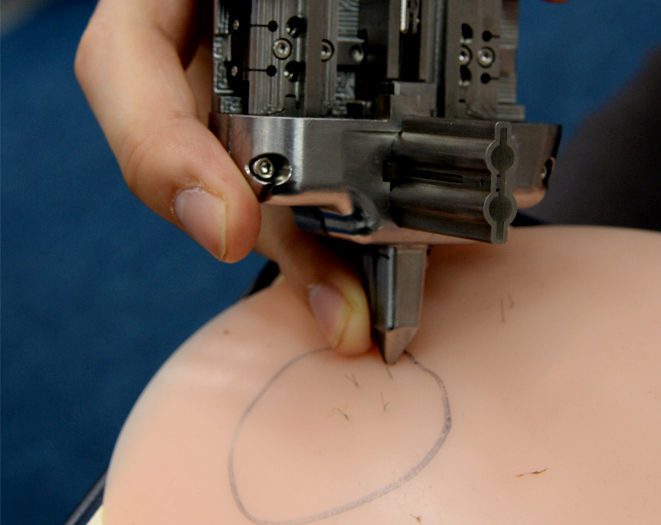
특히, 핵심기술로는 모낭이 탑재된 바늘 공급부 속의 바늘이 움직여 환자의 머리에 모낭을 심는 메커니즘과 연속해서 움직이는 바늘 간의 시간동기화를 제어하는 임베디드 SW 기술이다. 하나의 바늘이 하나의 모낭을 순차적으로 머리에 심는 데 있어 중요한 기술이라 할 수 있다.
아울러 식모기 내의 모터와 모터를 제어하는 기술, 내경 0.8mm 바늘 안에 삽입된 모낭이 머리를 심은 후 바늘이 빠지면서 모낭이 이탈되지 않도록 바늘 안에서 외경 0.6mm 봉이 동작하는 제어기술도 개발했다. 제어기술은 두피에 모낭이 잘 안착하게 해주는 기술이다.
이를 통해 연구진은 식모기에 모낭을 25개까지 연속적으로 저장하는 바늘 공급부, 하나씩 모낭을 이식하는 바늘, 바늘을 통해 모낭 한 개를 심기, 그리고 움직이는 바늘과 봉의 정밀 동작 제어 및 사용된 바늘 횟수 등 일련의 연구에 성공했다.

향후 모발이식 로봇 발전으로 기대
ETRI 연구진은 이번 연구에서 요구사항 도출, 설계, 시험 등의 단계에 임상 전문가 및 의사가 함께 참여하여, 제품 개발 및 품목허가, 임상평가 시간을 최소화해 제품 조기 상용화가 가능하도록 했다.
ETRI 최은창 의료IT 융합연구실장은 “임상시험을 바탕으로 향후 의사의 의견을 꾸준히 수용해, 멸균·소독, 식모기 경량화, 식모 수준의 속도 향상 등을 중점으로 개선하여 상용화 개발에 힘쓰겠다”고 말했다.
한편, 본 기술은 ETRI와 경북대학교병원 모발이식센터 및 의료기기/로봇연구소, 지역기업체인 (주)덴티스 등과 함께 개발한 것이다.
공동연구에 참여한 경북대학교병원 모발이식센터 김문규 교수는 “모발이식 수술은 의사가 2천여 개에 달하는 모낭을 일일이 심다 보니 근골격계 질환이 발생해 문제였는데, 본 기술이 이를 해결해줄 수 있을 것이다”고 기대했다.
ETRI 이수인 대경권연구센터장은 “자동 식모기와 같은 지역 특화된 산업기술 개발에 박차를 가하기 위해, 앞으로도 실수요자인 지역 병원 및 관련 기업과 지속해서 연구 협력을 해나갈 것이다”고 말했다.
ETRI는 더욱 효율적인 모발이식을 위해 모낭탑재기 개발도 진행하고 있다. 아울러 본 기술 상용화 이후, 로봇 식모기 개발도 계획 중이다. 이를 위해 모낭의 생착률 향상, 식모 시간 단축, 기기의 지능화 등이 필요하다. 향후 연구진은 다양한 영상 및 비전처리, 실시간 위치트래킹 기술, 초소형센서 및 다관절 로봇암 제어 기술 등 더 많은 IT 요소 기술이 접목될 것으로 예측했다.
