Q.01
소셜로봇이란 무엇인가요?

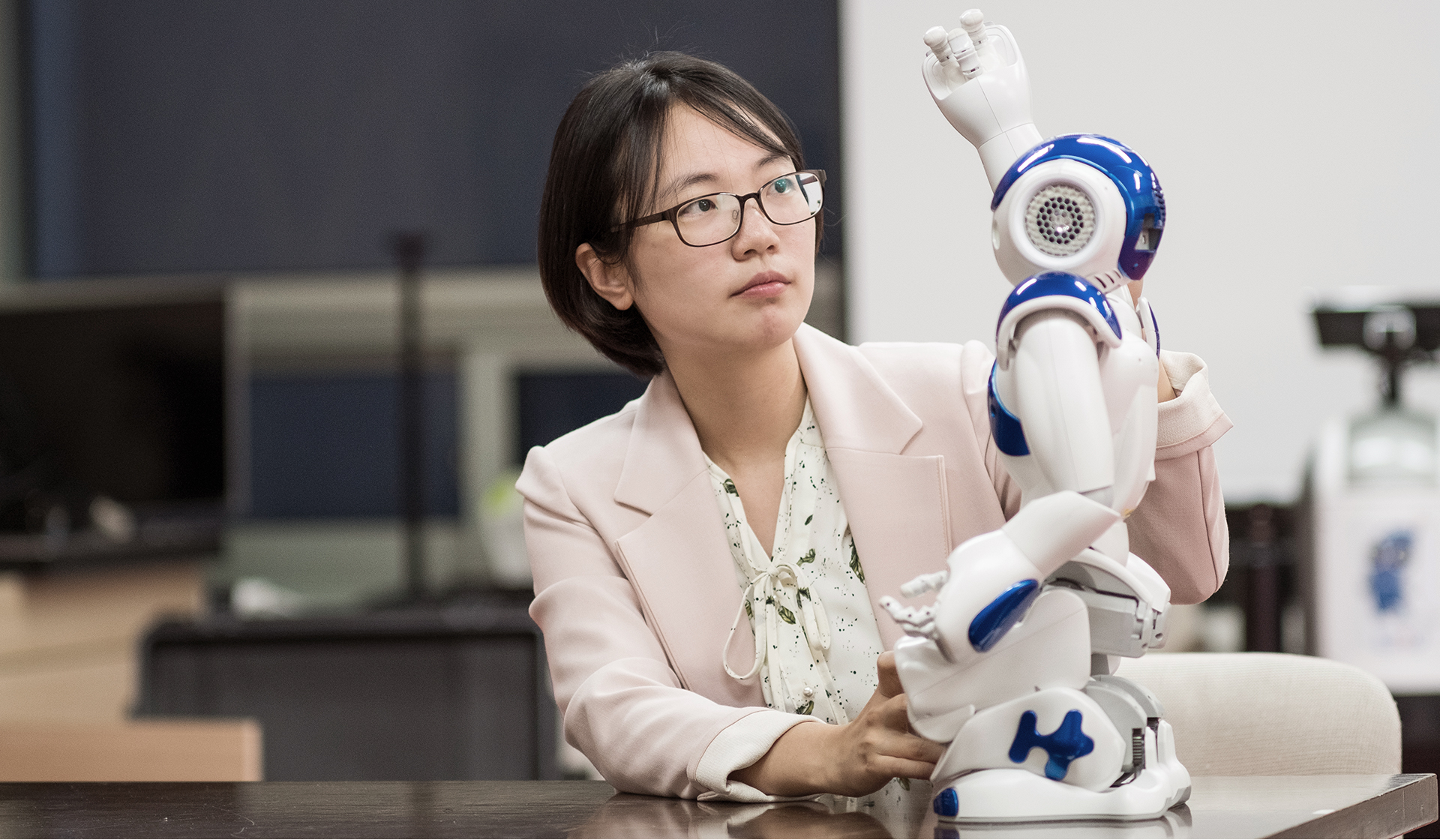
고우리 박사는 사람과 상호작용을 할 수 있는 ‘소셜로봇’을 연구한다. 특히 고령자를 위한 휴먼 케어 로봇을 개발하는 데 주력하고 있다. 그렇다면 소셜로봇이란 무엇일까? 소셜로봇은 단순한 동작만을 반복하는 로봇이 아닌 사람과 서로 상호작용할 수 있는 지능형 로봇을 의미한다. 그렇기에 소셜로봇은 상대편에 마주한 사람의 감정과 행동을 인식하고 판단해 그에 합당한 행동을 취할 수 있다. 그 어느 로봇보다 감정적인 로봇인 셈이다.
“사용자의 움직임에 대응하는 행동을 생성하고 이를 바탕으로 긍정적인 관계를 형성할 수 있는 로봇을 개발하고 있습니다. 노인의 말벗이 되어주거나 슬플 때 안아주는 역할을 할 수 있죠. 노인이 악수를 청하면 손을 내밀고 인사를 건네오면 그에 상응하는 인사를 하는 로봇이에요. 이러한 로봇을 구현하고자 가장 쉽게 접근할 수 있는 방법이 로봇의 행동을 프로그래밍하는 것이에요. 하지만 로봇에게 일어날 수 있는 수많은 상황을 미리 파악하고 대응하는 방법을 정의하는 것은 어려운 일이죠. 현재 제 연구는 로봇 스스로가 인간의 행동 방식을 학습하도록 하는 데 목적이 있습니다.”
Q.02
로봇은 스스로 상황을 인식하고 판단할 수 있을까요?

사람과 로봇이 상호작용할 수 있도록 하는 기술이 바로 ‘HRI(Human-Robot Interaction)’이다. HRI 기술은 로봇이 사람의 지각, 인지, 표현 기능을 모사할 수 있도록 하는 기술로, 로봇에 생동감을 부여한다. 그렇다면 HRI에 기반한 소셜로봇은 스스로 상황을 인식하고 판단할 수 있을까.
고우리 박사의 대답은 “Yes”이다. 이미 이를 실현가능케 하고자 다양한 기술개발을 진행하고 있다. 로봇이 상황을 인식하고 판단할 수 있도록 하기 위해 고우리 박사는 특히 인공지능의 ‘딥러닝’ 기술을 활용하고 있다. 인공지능에 무수히 많은 학습을 시켜 스스로 생각하고 행동할 수 있도록 하는 것이다. 따라서 많은 상황과 환경에 따른 다양한 행동 데이터를 소셜로봇이 직접 학습하고, 행동할 수 있도록 하는 것이 기술의 가장 큰 핵심이라 할 수 있다.
“영상 데이터를 수집하는 일이 기술의 90%를 차지하는 것 같아요. 그만큼 데이터 확보가 중요하죠. 영상 데이터를 수집하기 위해 직접 발로 뛰고 있어요. 사람과 사람이 서로 상호작용하는 것을 영상으로 기록하고자, 다양한 상황을 가정해 연출해요. 행동에 따라 반응하는 모습을 영상으로 기록하는 거죠. 로봇은 스스로 사람과 사람 간 상호작용 장면을 보고 그들의 행동 방식을 학습해요. 여러 상황을 경험할 수 있도록 하는 것이 중요하죠. 데이터가 정말 중요하죠.”
사람 간 상호작용을 학습한 로봇은 어떤 감정을 인식할 수 있을까. 행복, 슬픔, 화남, 두려움, 놀람, 기쁨 등을 느끼고 이에 맞는 행동을 취할 수 있다. 사용자가 하는 행동에 따라 소셜로봇은 스스로 행동을 만들 수 있는 것이다.
사실 현재 이 같은 소셜로봇은 시작 단계에 있어, 넘어야 할 산이 많다. 하지만 이미 일본 산업기술총합연구소(AIST)가 개발한 파로(PARO)가 그 효과를 입증받고, 대중화에 성공한 바 있다. 특히 심리 치료와 치매 치료에 효과가 있는 것으로 나타나 소셜로봇의 가능성을 보여주었다. 머지않아 우리의 일상에도 소셜로봇이 들어올 수 있다는 이야기다.